 PLC学习资料
PLC学习资料  电工基础知识
电工基础知识  电工技术基础
电工技术基础 电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 电工技术基础
电工技术基础 智能车主控体系电路计划原理图
智能车主控体系电路计划原理图
如今运用在智能小车或机器人的微操控器首要是8/16单片机或ARM和数字信号处理器DSP等。本计划选用TI公司出产的功耗低作业速度快且报价廉价的MSP430F2274为基地,避障检查选用测距精准的超声波传感器,该传感器搜集小车周围的环境信息并传递给MSP430进行程序差异处理,然后到达操控小车主动避障的意图。
主控芯片
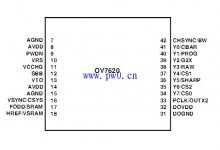
该计划是以MSP430F2274单片机为操控的基地部件。MSP430是一款16位的超低功耗单片机,选用了精简指令集(RISC)构造,具有丰厚的寻址办法,片内本钱丰厚,处理才调强健、体系作业安稳,首要是它具有多路PWM输出,以作为该计划电机操控的有利本钱,体系主控计划图如图2所示。

图2 体系主控计划图
超声波模块
避障是智能小车运动进程中最根柢的功用,而避障首要是断定机器人自身与阻遏物的间隔并且定位。小车的避障勘探模块选用 SRF08超声波收发模块,其波频率为40 kHz,检查间隔范嗣为3 cm~6 m,SDA和SCL别离为操控端和接纳端,计划共选用4个超声波收发模块别离设备在小车的正前方,右前方和左前方和后方,4个模块别离接在MSP430单片机的I/OP1.0、I/OP1.1、I/OP1.2、I/OP1.3、I/OP1. 4、I/OP1. 5、I/OP1.6、I/OP1.6端口上,选用I/O触发测距,单片机给SDA供应25μs高电平信号,模块主动发送8个40 Hz方波,并且检查是不是有回来信号,若有回来信号,SCL管脚输出高电平,高电平继续的时刻即是超声波从发射到回来的时刻,然后核算出超声波从发射到接纳所用的时刻t,常温下声波在空气中的传达速度(其间T为摄氏温度),此刻可得到是不是避障的间隔为s=vt/2。
测温文电源模块
为了使核算的间隔更准确而不受温度影响,该计划中参加了DS18B20温度传感器接在I/OP4.6上,实时检查机器人周围环境的温度T(T的值要准确到小数点后3位),以批改声速的传达公式V,然后行进测距的准确度。因为MSP430作业电压最大是3.3 V,电机驱动选用12 V电压,测速模块和超声波模块选用5 V电压,所以选用LM7812、LM7805和LM1117构成稳压电路。。

图3 电机驱动模块
电机驱动模块
电机驱动模块是智能车的首要构成有些,它和电机一同构成智能小车的运动操控体系。该计划的驱动轮是由2个M1和M2沟通永磁同步电机,因而选用的电机驱动器是高电压大电流高功率的L298N双H桥集成电路,L289N能够驱动两个电机,经过操控输入端IN1-IN4信号,来操控 H桥的通断,使得电安排成正回转或接连,经过操控L298N的使能端EnA、EnB,选用技能老到的PWM调速原理来操控电机的转速,然后到达操控小车作业的快慢和转向的意图。为了防止在启停电机的刹那间所构成的反响电流损坏L298N,因而在L298N输出端与电机之间参加8个二极管构成续流到达维护的效果,再则为了防止L298N输出负载端电机对输入端信号传输发作影响,以及对MSP430芯片发作晦气的搅扰,在L298N的信号输入端经过联接 TLP521可操控的光电电耦合器材,到达对L298N信号输入前端的信号电路与负载的彻底阻隔,然后增加了电路的安全性,削减了电路信号搅扰。本计划中的驱动电机选用的是方波驱动的沟通永磁同步电机,该电机的转速与驱动信号的频率成正比,构造简略,调速功用优异,作业牢靠且便于维护。其电机驱动和操控模块电路如图3所示。
上一篇:protel pcb布线学习笔记
下一篇:寄存器的效果是啥
相关推荐

推荐阅读
猜你喜欢
电工推荐
