 PLC学习资料
PLC学习资料  电工基础知识
电工基础知识  电工技术基础
电工技术基础 电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 电工技术基础
电工技术基础 互补滤波算法详解
互补滤波算法的了解大约如下。陀螺仪的短期测得的值比照准,可是因为存在温漂,进过积分,长时刻就不能用了。所以要经过加快度计进行批改视点,可是加快度计的短期不可,噪声比照大,所以要将陀螺仪高通,加快度计低通后进行必定比列的交融。才干比照精确的反响视点的改动。
我是这么做的:陀螺仪和加快度计别离进行了递推和一阶滤波,得到的滤波作用再按必定的份额进行拟合,采样周期为0.3ms。可是出来的作用不抱负。究竟直立操控量=P*(交融滤波后的视点)+D*(角速度(即陀螺仪的值))
angle=(int)(0.99*(angle+(gyro-2940)*0.008)+0.01*(y_acc-3150))
int PIDCalc( unsigned int NextPoint )
{
int PID;
Error = standard - NextPoint; // 过失E(t)
iError+=Error; //E(t)+E(t-1)+...+E(1)
dError=Error-LastError; //E(t)-E(t-1)
PID=(int)(Proportion * Error //份额
+Integral*iError //积分
+ Derivative * dError); // 微分项
PrevError = LastError;
LastError = Error;
return (
PID
);
}
void PIDBEGIN()
{
Proportion = 6; // Set PID Coefficients 10
Integral=0.002;
Derivative = 120; // 4
}
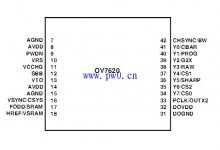
传感器是mma-7361,enc-03
上一篇:单片机晶振电路计划阐明
下一篇:继电器自锁电路图原理

最新更新
推荐阅读
猜你喜欢
电工推荐
