PLC控制分拣大小球的机械装置的程序设计原由是什么?
(1)由于大小球的不同,所以使用了分支选择电路,使机械臂能够在右行后在不同的位置下行,把大小球分别放进各自的箱子里去。
(2)在机械手上、下、左、右行走的控制中,加上了一个软件联锁触点,替代了SM0.0。
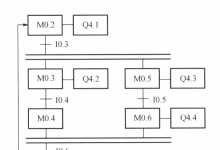
(3)图7-10中的M0.0是一个选择逻辑,其功能如图7-11中的网络1所示,它相当于一个开关,控制着系统是进行单周期操作还是循环操作。
(4) S7-200系列PLC的顺控指令不支持直接输出(=)的双线圈操作。如果在图7-10中的状态S0.1的SCR段有Q0.2(下行)输出,在状态S1.0的SCR段也有Q0.2输出,则不管在什么情况下,在前面的Q0.2永远不会有效。这是S7-200系列PLC顺序控制指令设计方面的缺陷,为用户的使用带来了极大的不便。所以在使用S7-200系列PI。C的顺序控制指令时一定不要有双线圈输出。为解决这个问题,可采用本例的办法,用中间继电器逻辑过渡一下。例如,本例的机械手进行上行、下行和右行的控制逻辑设计,凡是有重复使用的相同输m驱动,在SCR段中先用中间继电器表示其分段的输出逻辑,在程序的最后再进行合并输出处理。这是解决这一缺陷的最佳方法。左行时只有在状态Sl.3中用到了Q0.5,所以就不用中间过渡处理了。
注意:经作者验证,在CPUV1. 21版本和Micro/Win32 V3.2版本中该系
统软件缺陷仍存在。
上一篇:PLC控制分拣大小球的机械装置的改造过程包括哪几个方面?
下一篇:PLC控制化学反应过程的装置的设计要求是什么?
相关推荐
 PLC入门基础
PLC入门基础 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC入门基础
PLC入门基础