 PLC入门基础
PLC入门基础 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC入门基础
PLC入门基础 plc编程机器人抓手
本文主要介绍了PLC编程机器人抓手的相关内容。对PLC编程机器人抓手进行了概述,介绍了其作用和特点。然后,从多个方面对其进行了详细阐述,包括PLC编程的基本原理、机器人抓手的结构和工作原理、PLC编程机器人抓手在工业生产中的应用等。强调了PLC编程机器人抓手在自动化生产中的重要性。
PLC编程基本原理
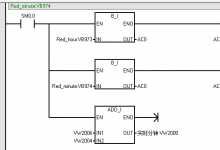
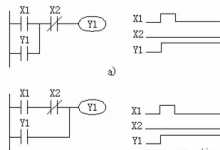
PLC编程是指通过编写PLC(可编程逻辑控制器)的程序,控制机器人抓手的运动和动作。PLC编程的基本原理是将输入信号经过逻辑运算和控制算法处理后,输出控制信号,从而实现对机器人抓手的控制。PLC编程采用了类似于电路图的编程语言,包括了逻辑运算、计时器、计数器等功能模块,可以实现复杂的控制逻辑。
PLC编程的过程包括了编写程序、调试程序和上传到PLC等步骤。编写程序时,需要根据实际需求设计控制逻辑,包括输入信号的检测、输出信号的控制以及各种中间变量的计算和判断。调试程序时,需要通过模拟输入信号和监视输出信号的方式,检查程序的正确性和稳定性。上传到PLC后,程序会在PLC中运行,实现对机器人抓手的控制。
PLC编程的优点是灵活性高、可靠性好、可扩展性强。通过编写PLC程序,可以根据实际需要对机器人抓手的控制逻辑进行灵活调整和修改,适应不同的生产需求。PLC编程具有较高的可靠性,可以确保机器人抓手的运动和动作准确可靠。PLC编程还具有良好的可扩展性,可以根据需要添加新的功能模块和控制算法,满足不断变化的生产需求。
机器人抓手的结构和工作原理
机器人抓手是机器人系统的重要组成部分,用于实现对物体的抓取、搬运和放置等操作。机器人抓手的结构通常包括机械臂、末端执行器和传感器等部件。机械臂用于控制抓手的运动和姿态,末端执行器用于实现对物体的抓取和释放,传感器用于检测物体的位置和状态。
机器人抓手的工作原理是通过控制机械臂的运动和末端执行器的动作,实现对物体的抓取和放置。在抓取过程中,机械臂根据预先设定的轨迹和姿态,将抓手移动到目标位置,然后末端执行器通过压力或夹持等方式,将物体抓取住。在放置过程中,机械臂根据预先设定的轨迹和姿态,将抓手移动到目标位置,然后末端执行器释放物体。
机器人抓手的设计和优化是一个复杂的工程问题,需要考虑到抓取力度、抓取精度、抓取速度等多个因素。通过合理设计机械结构和控制算法,可以实现对不同形状、不同材料的物体进行准确可靠的抓取和放置。
PLC编程机器人抓手的应用
PLC编程机器人抓手在工业生产中有着广泛的应用。它可以用于自动化生产线上的物体抓取和搬运。通过编写PLC程序,可以实现对机器人抓手的自动控制,减少人工干预,提高生产效率和质量。它可以用于危险环境下的物体处理。在一些危险环境下,人类无法直接进行物体处理,通过PLC编程机器人抓手可以实现对物体的远程操作,保证人员的安全。PLC编程机器人抓手还可以用于特殊工艺的物体处理,如高温、高压等特殊条件下的物体抓取和放置。
PLC编程机器人抓手是现代工业生产中的重要设备,具有灵活性高、可靠性好、可扩展性强等优点。通过合理设计和编写PLC程序,可以实现对机器人抓手的准确控制,提高生产效率和质量,满足不同的生产需求。
本文主要介绍了PLC编程机器人抓手的相关内容。对PLC编程机器人抓手进行了概述,介绍了其作用和特点。然后,从多个方面对其进行了详细阐述,包括PLC编程的基本原理、机器人抓手的结构和工作原理、PLC编程机器人抓手在工业生产中的应用等。强调了PLC编程机器人抓手在自动化生产中的重要性。通过合理设计和编写PLC程序,可以实现对机器人抓手的准确控制,提高生产效率和质量,满足不同的生产需求。
上一篇:plc编程机械手梯形图
下一篇:plc编程机械手编程梯形图


最新更新
推荐阅读
猜你喜欢
电工推荐
