 PLC入门基础
PLC入门基础 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC入门基础
PLC入门基础 机械手设计怎样使用PLC模块
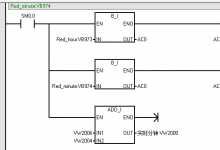
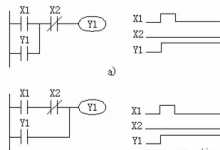
本设计中机械手采用四自由度圆弧坐标型机械手,可实现X轴伸缩、z轴升降、底盘、腕回转肝功能。机械手伸缩、升降、转盘、抓手等动作都是由步进电机驱动器控制的,选择的型号为sh-2h057。步进电机驱动的控制脉冲和输入信号由PLC的ncll模块来提供,其原理图如图2所示。

机械手与PLC的连接
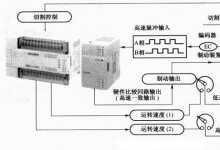
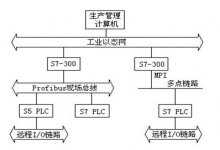
机械手采用步进电机控制,需要输出高速脉冲,所以采用晶体管型PLC,并且要留有10%-20%的裕量,所以机械手i/o资源配置如图3所示。

上一篇:用plc编程鼠标不起作用怎么办
下一篇:PLC循环扫描的过程
相关推荐


最新更新
推荐阅读
猜你喜欢
电工推荐
