 PLC入门基础
PLC入门基础 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC入门基础
PLC入门基础 机械手臂plc编程代码
本文主要介绍了机械手臂PLC编程代码的相关内容。首先从随机方面对机械手臂PLC编程代码进行详细阐述,包括代码结构、编程语言、逻辑控制、异常处理、联锁保护、数据通信等。然后,通过或章节详细描述了机械手臂PLC编程代码的主要内容。结合机械手臂PLC编程代码强调了其在工业自动化领域的重要性。
代码结构
机械手臂PLC编程代码的结构通常包括初始化、主程序、子程序和中断程序等部分。初始化部分用于初始化各个模块和变量,主程序用于控制机械手臂的运动和动作,子程序用于完成特定的任务,中断程序用于处理紧急情况。
在编程过程中,需要合理划分代码结构,使其具有良好的可读性和可维护性。还需要考虑代码的执行顺序和优先级,确保机械手臂能够按照预期的方式进行操作。
代码结构的设计对于机械手臂PLC编程的效率和稳定性具有重要影响,需要根据具体的应用场景进行合理的调整和优化。
编程语言
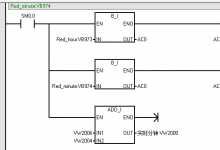
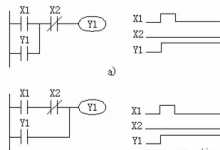
机械手臂PLC编程代码可以使用多种编程语言实现,例如Ladder Diagram(梯形图)、Structured Text(结构化文本)、Function Block Diagram(功能块图)等。不同的编程语言适用于不同的编程需求,可以根据实际情况选择合适的语言。
梯形图是一种图形化编程语言,类似于电气图形符号,易于理解和使用。结构化文本是一种基于文本的编程语言,具有较高的灵活性和可扩展性。功能块图是一种基于图形的编程语言,可以方便地表示复杂的逻辑关系。
选择合适的编程语言可以提高编程效率和代码质量,同时也需要考虑编程人员的熟悉程度和项目需求。
逻辑控制
机械手臂PLC编程代码的主要任务是实现对机械手臂的逻辑控制。通过编写逻辑控制代码,可以实现机械手臂的运动、动作和操作。
逻辑控制代码通常包括条件判断、循环控制和数据处理等部分。条件判断用于根据不同的情况执行不同的操作,循环控制用于重复执行某个操作,数据处理用于对输入和输出数据进行处理。
逻辑控制的编程需要考虑机械手臂的运动规划和路径规划,以及与其他设备的联动和协调。还需要考虑异常情况的处理和安全保护措施。
异常处理
机械手臂PLC编程代码中的异常处理是确保机械手臂在遇到异常情况时能够安全停止或采取相应的措施。异常情况可能包括机械手臂的故障、传感器的故障、工件的异常等。
异常处理代码通常包括故障检测、故障处理和故障恢复等部分。故障检测用于监测机械手臂和相关设备的状态,故障处理用于采取相应的措施,故障恢复用于恢复机械手臂的正常运行。
异常处理的编程需要考虑各种可能的异常情况,并设计相应的处理策略。还需要与其他设备和系统进行联动,确保整个工作流程的稳定性和安全性。
联锁保护
机械手臂PLC编程代码中的联锁保护是为了防止机械手臂在不安全的情况下进行操作,保护人员和设备的安全。联锁保护通常包括安全传感器、安全开关和安全逻辑等部分。
安全传感器用于监测机械手臂周围的安全区域,安全开关用于控制机械手臂的启停,安全逻辑用于判断机械手臂是否处于安全状态。
联锁保护的编程需要考虑机械手臂的运动范围和安全区域,设计合理的安全策略和联锁逻辑。还需要与其他设备和系统进行联动,确保整个工作流程的安全性。
数据通信
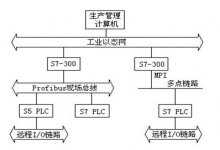
机械手臂PLC编程代码中的数据通信是为了实现机械手臂与其他设备和系统之间的数据交换和共享。数据通信通常包括数据采集、数据传输和数据处理等部分。
数据采集用于获取机械手臂和相关设备的状态和参数,数据传输用于将采集到的数据传输给其他设备和系统,数据处理用于对接收到的数据进行处理和分析。
数据通信的编程需要考虑数据的格式和协议,设计合理的数据采集和传输策略。还需要与其他设备和系统进行协调和协作,确保数据的准确性和及时性。
机械手臂PLC编程代码是实现机械手臂逻辑控制的重要组成部分。通过合理设计代码结构、选择适当的编程语言、实现逻辑控制、处理异常情况、保护安全、实现数据通信,可以实现机械手臂的高效、稳定和安全运行。
机械手臂PLC编程代码在工业自动化领域具有重要的应用价值,可以广泛应用于制造业、物流业、仓储业等领域。随着技术的不断发展和创新,机械手臂PLC编程代码将会越来越智能化和自动化,为工业生产和生活带来更多便利和效益。
上一篇:机械手移动的plc编程方法
下一篇:机械手臂plc编程设计思路


最新更新
推荐阅读
猜你喜欢
电工推荐
