 PLC学习资料
PLC学习资料 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC学习资料
PLC学习资料 PID调节功能块FB41总结
在刚触碰PID情况下觉得很头痛,FB41功能块多种多样的I/O及其协助里边十分技术专业的表述都看我头晕眼花,头晕眼花,真的是不清楚怎样下手,之后应用几回之后发觉,原先仅仅填填自变量的事(大家的PID便是简易的操纵,都还没涉及到转换、加泵及其减泵等繁杂难题),恰好近期有时间,就归纳了一下FB41的接线端子表明(基本上来源于大伙儿技术交流的共享),就作为个手记吧。
1、FB41的程序框图(FB41的端口号功效逻辑图,看懂这一基本上就都是会了)

2、标准化的(我觉得并不是务必要标准化的,全部FB41功能块统一量纲就可以了)
PID主要参数中关键的3个自变量,给出值(SP_INT),意见反馈值(PV_IN)和輸出值(LMN)全是用0.0~100.0中间的实数表明。
因而,必须将仿真模拟键入变换为0.0~100.0的数据信息,或将0.0~100.0的数据交换为模拟输出,这一全过程称之为标准化的
标准化的的方式 :(即自变量相对性所占全部函数值域范畴内的百分数 相匹配与27648数据量范畴内的量)
针对给出值(SP_INT)和意见反馈值(PV_IN),实行:自变量*100/27648,随后将結果传输到PV-IN和SP-INT
针对輸出自变量 ,实行:LMN*27648/100,随后将結果求整传输给PQW就可以。
3、一般应用循环系统终断机构块启用FB41,一般无需OB1,由于OB1的扫描仪周期时间并不是明确的。
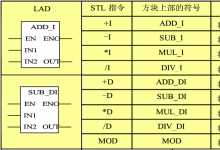
4、FB41的I/O主要参数
In
<1、COM_RST:BOOL,复位FB41。设定为1时,積分求微分的总计清零。不容易全自动校准,必须程序流程校准COM_RST。一般应用以下:
能够在OB100、OB101、OB102里边写几句话
AN “COM_RST” //假如复位标志位是0
S “COM_RST” //将复位标示部位1
在OB1的最终写上几句话,校准复位标志位
A “COM_RST” //假如复位标志位1
R “COM_RST” //将复位标志位校准
PID的复位能够根据在OB100中启用一次,将主要参数COM-RST置位,自然也可在其他地区复位它,重要的是看程序流程必须;
<2、MAN_ON:BOOL,设定为0为全自动调节;设定为1为手动式调节;这儿会牵涉到一个全自动和手动式方式的转换难题:无振荡转换
PID控制器在全自动→手动式、或手动式→全自动的一瞬间,PID的輸出不是转变的。
从手动式转换到全自动,自别说,可是从全自动到手动式会发生显著颤动,一般能够那样解决:从全自动转换到手动式提升一个陡坡解决。将全自动时的輸出计算成占比值,一直载入在MAN口边,转换后,根据陡坡,将MAN口边的值由原先的值过多到手动式占比预设值。
此端口号和<11处的MAN口相互配合应用。
<3、PVPER_ON:BOOL,全过程值挑选,此值与PV_IN和PV_PER有关系
设定为1时,立即将PIW(检测具体值端口号)键入PV_PER口
设定为0时:将转换后、过滤后且标准化的后(等解决过的)数据信息輸出PV_IN口
<4、P_SEL、I_SEL及其D_SEL:BOOL,占比、積分、求微分功效的挑选,设定为0,相对应一部分失灵。
<5、INT_HOLD:BOOL,積分维持,设定为1时,積分不累积,一般不设定。
<6、I_ITL_ON:BOOL,積分初始值给出;
I-ITLVAL:REAL,積分初始值。
当I_ITL_ON设定为1时,应用I-ITLVAL自变量積分初始值;当I_ITL_ON设定为0时,積分初值为0。一般当发觉PID作用的積分值提高较慢或系统软件反映不足时能够考虑到应用積分初始值;此作用非常少使用。
<7、CYCLE:TIME,PID取样周期时间。
<8、SP_INT:REAL,PID的预设值。
<9、PV_IN :REAL,PID的意见反馈值。基本数据类型为Real,显而易见是解决后的标值,见<3。
<10、PV_PER:WORD,PID的意见反馈值。基本数据类型为Word,显而易见立即PIW键入,见<3。
<11、MAN:Real,手动式方式的键入端口号。
<12、GAIN:REAL,占比增益值。
<13、TI:TIME,積分時间。
<14、TD:TIME,求微分時间。
<15、TM_LAG:TIME,多久打开求微分,因为求微分会消弱做到平稳值時间,能够延时启动求微分。一般不设定。
<16、DEADB_W:REAL,过流保护总宽。当场监管做到预设值后,并不稳定到预设值,假如发生小范畴波动,会发生电动执行机构往返姿势难题,能够考虑到用过流保护来减少敏感度。此数值百分比。
<17、LMN_HLM、LMN_LLM:REAL,輸出值左右極限。这里必须配搭<19处应用,即确保LMN_HLM*LMN_FAC=100,程序流程中默认设置LMN_HLM为100.0,LMN_FAC为1.0,因此 能够无需去设定。假如想设定,必须确保上边的公式计算。
<18、PV_FAC、PV_OFF:REAL,PV_FAC=感应器的测量范围/100。仅有在PVPER_ON为1时起功效,目地为统一企业;为零时,必须标准化的,企业早已统一,因此 这里没用。
<19、LMN_FAC、LMN_OFF:REAL,輸出值的测量范围。
<20、DISV:REAL,容许的振荡量,串级系统软件应用,一般不设定;
OUT
<1、LMN:REAL,輸出具体值占满度的百分数。
<2、LMN_PER:WORD,PQW輸出
<3、QLMN_HLM、QLMN_LLM:BOOL,QLMN_HLM:輸出最高值时輸出1;QLMN_LLM:輸出极小值时輸出1,能够做为工、变频式转换(比如一台泵直流,一台泵规定变频式,调整恒流源时)的定位点来用。
<4、LMN_P、LMN_I、LMN_D:REAL,PID輸出中P、I、D的份量。三者的和为輸出值。
<5、PV:REAL,具体工作压力值
<6、ER:REAL,偏移值,预设值与具体值之差。
之上一部分添加了自身的念头,若有不正确望诸位侠客指责具体指导。
上一篇:PLC的循环指令




最新更新
推荐阅读
猜你喜欢
电工推荐
