 PLC入门基础
PLC入门基础 电工基础知识
电工基础知识  电工技术基础
电工技术基础  电工维修知识
电工维修知识  电工安全知识
电工安全知识  电工考证知识
电工考证知识  电工学习网
电工学习网 PLC入门基础
PLC入门基础 可编程操控器的硬件联接和软件计划
可编程操控器的硬件联接和软件计划
可编程操控器的硬件联接
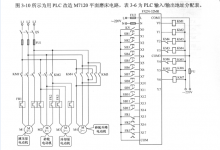
本模块所需的硬件及输入 /输出端口分配如图所示。由图可见:本模块除可编程操控器以外,还添加了有些器材,其间,SB1 为接连按钮,SB2为起动按钮,FR为热继电器的常开触点,KM1为主电源触摸器,KM2 为△形作业触摸器,KM3为Y形起动触摸器。 
3、软件计划 
常识点拓宽:
1、取脉冲指令LDP、LDF 
LDP取脉冲上升沿,指在输入信号的上升沿接通一个扫描周期
LDF取脉冲降低沿,指在输入信号的降低沿接通一个扫描周期
2、与脉冲指令ANDP、ANDF
ANDP: 
与脉冲上升沿
ANDF:与脉冲降低沿
3、或脉冲指令ORP、ORF 
ORP:或脉冲上升沿
ORF:或脉冲降低沿
4、多重输出指令MPS、MRD、MPP 
MPS,进栈指令
MRD,读栈指令
MPP,出栈指令
这三条指令是无操作元件指令,都为一个程序步长。这组指令用于多输出电路。可将联接点先存储,用于联接后边的电路
5、主控及主控复位指令MC、MCR 
MC为主控指令:用于共用串联接点的联接。
MCR叫主控复位指令:MC的复位指令。
在编程时,常常遇到多个线圈一同受一个或一组接点操控。假定在每个线圈的操控电路中都串入相同的接点,将多占用存贮单元,运用主控指令能够处理这一疑问。
事例一:
用PLC完结下图所示方波的2分频 
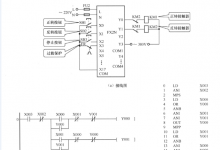
1、可编程操控器的硬件联接
依据前面的学习,再依据图中的标明,同学们能够自个画出输入及输出端口的分配,在这不加深述。
2、软件计划 
常识点联接:
1、 取反指令INV 
该指令用于运算作用的取反。当实施该指令时,将INV指令之前存在的如LD、LDI等指令的运算作用回转
2、置位与复位指令SET、RST 
SET为置位指令:使动作坚持
RST为复位指令:使操作坚持复位
3、脉冲输出指令PLS、PLF 
PLS指令:在输入信号上升沿发作脉冲输出
PLF指令:在输入信号降低沿发作脉冲输出
4、空操作指令NOP
NOP为空操作指令,该指令是一条无动作、无政策元件占一个程序步的指令。空操作指令使该步序作空操作。用NOP指令代替已写入指令,能够改动电路。在程序中参与NOP指令,在改动或追加程序时能够削减步序号的改动。实施完铲除用户存储器的操作后,用户存储器的内容悉数变为空操作指令。
5、程序完毕指令END
END是一条无政策元件占一个程序步的指令。PLC重复进行输入处理、程序运算、输出处理,若在程序终究写入END指令,则END往后的程序步就不再实施,直接进行输出处理。在程序调试进程中,按段刺进END指令,能够次第拓宽对各程序段动作的查看。选用END指令将程序差异为若干段,在供认处于前面电路块的动作准确无误往后,顺次删去END指令。要留心的是在实施END指令时,也改写监督时钟。
事例二:
现代工业出产广泛选用流水作业,对制品或半制品进行分检,扫除残次品是有必要的工序。在流水线上,制品或半制品通常要经过若干项查验,契合恳求者得以经过,跟着流水线进入下道出产工步。而不合格者有必要在某处会集地予以扫除,不得进入下道出产环节。因而,制品或半制品随传送带递进进程中,对其进行的查验作用也有必要同步地向前移动。这么,当不合格者移动到规矩的扫除点时,才华准确地加以扫除,然后完结质检与分检。运用 PC 供应的移位寄存器功用,能够很便本地做到这一点。
1、 质量操控进程暗示图 
如图所示,工件在传送带上步行式跋涉。工件在 0 号站承受 PH1 光电查看。从 0 号站移到 4 号站要经过 4 次步进。移到 4 号站时,差异移到此站工件好仍是坏。假定是废品则恳求电磁阀 YV 翻开,使废品掉下来。当 PH2 查看到废品已掉下来后从头将电磁阀封闭。 PLC 的输入条件有以下几个: PH1 光电查看,当工件合格时, PH1 数据为“ 0 ”;当工件废品时, PH1 数据为“ 1 ”。 PH2 光电查看,当数据为“ 1 ”标明废品已掉下来。 LS 为行程开关,凸轮每转一次 LS 接通一次,工件步进一步。 S 为外加复位按钮。 PC 的输出点只需一个即电磁阀 YV 。
2、硬件的联接
依据上述模块的学习,再依据图中的标明,同学们能够自个画出输入及输出端口的分配,在这不加深述。 
3、体系的软件计划
可编程操控器编程的根柢准则:
1、水平不笔直 
梯形图的接点应画在水平线上,不能画在笔直分支上
2、 线圈右边无接点 
不能将接点画在线圈右边,只能在接点的右边接线圈
3、左大右小,上大下小 
有串联电路并联时,应将接点最多的那个串联回路放在梯形图最上面。有并联电路相串联时,应将接点最多的并联回路放在梯形图的最左面。
4、双线圈输出不行用 
假定在同一程序中同一元件的线圈运用两次或屡次,则称为双线圈输出。这时前面的输出无效,只需终究一次才有用,通常不该呈现双线圈输出。
上一篇:三菱PLC编程软件GX Developer 8.86的设备教程
下一篇:欧姆龙PLC与组态王通讯设置实例
最新更新
猜你喜欢
电工推荐
